


Cum se poate determina pozitia unui punct cu ajutorul tehnologiei GPS
Va prezentam mai jos cei cinci pasi necesari in a intelege cum se poate determina pozitia unui punct cu ajutorul unui receptor GPS

1.Baza determinarii unei pozitii cu ajutorul GPS-ului este "trilateratia" de la sateliti.
In fiecare secundă un satelit emite un semnal radio ( in care este inclus si un număr atribuit PRN - Pseudo Random Number, număr ce se refera la identificarea acestuia).
Prin "Trilateratie" pozitia va fi determinata masurand distanta ( de la receptor) ,din punctul ce urmeaza a fi determinat la grupul de sateliti care sunt vizibili .

Atunci cand primim un semnal de la un singur satelit pozitia noastra poate fi oriunde pe suprafata acestei sfere ( semnalul radio se propaga in toate directiile cu aceeasi viteza teoretic)

In momentul in care primim semnalul de la 2 sateliti zona de determinare a pozitiei se restrange la intersectia a 2 sfere adica pe un cerc, noi putand fi teoretic oriunde pe perimetrul acestuia.
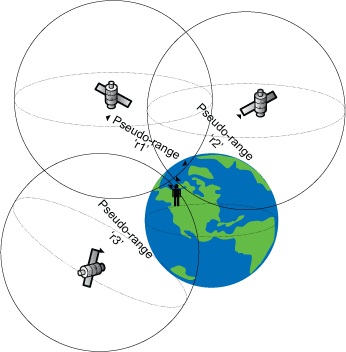
In cazul in care apare si un al treilea satelit receptionat de catre receptorul GPS, poziţia de determinare poate fi la intersectia a trei sfere adica in 2 puncte posibile. Mai trebuie determinat care punct este corect.
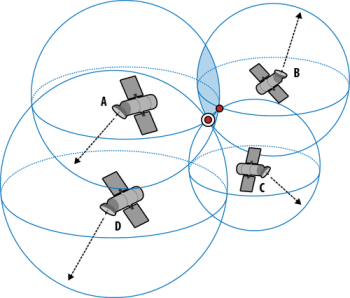
Întrucât sunt 2 puncte posibile la aparitia unui al patrulea satelit se va decide poziţia cu ajutorul acestuia.
In concluzie pentru o determinare exacta a unei pozitii este necesar sa avem o receptionare a semnalului de la minim 4 sateliti.
2. Pentru a trilatera , un receptor GPS masoara distanta folosind timpul de propagare al undelor radio.
Cum se determina distanta de la sateliti care sunt totusi in spatiu?
Distanta intre receptorul GPS si sateliti este facuta prin măsurarea timpului necesar parcurgerii semnalului radio din momentul emiterii de către GPS si momentul receptionarii acestuia de catre receptor.
Întrucât masuram un semnal radio, viteza de propagare a semnalului va fi viteza luminii ( lumina si toate celelalte forme de radiatie electromagnetica calatoresc în vid cu o viteza de circa 299,792,458km/s, iar în aer ceva mai încet)

Problema cea mai mare care apare este masurarea timpului de propagare a semnalului cu o maxima acuratete.De vom avea nevoie de niste ceasuri foarte precise. In cazul in care dispunem de ceasuri foarte precise tot ce avem nevoie sa stim este timpul cand semnatul a fost emis de către satelit.
Atat receptoarele GPS cat si satelitii sunt sincronizati astfel incat sa genereze aceleasi coduri in acelaşi timp, un asa numit "Pseudo Random Code" (PRC).
![]()
"Pseudo Random Code"-ul (PRC)este o parte fundamentala a GPS-ului.Din punct de vedere fizic este un cod digital foarte complicat,cu alte cuvinte este o secventa complicata de pulsuri1 si 0.
Constructia complexa a semnalului asigura ca receptorul sa nu se sincronizeze accidental cu alte semnale.Tiparul este atit de complex incit este aproape imposibil ca un semnal ratacit sa aiba aceiasi forma. Pentru ca fiecare satelit are propriul si unicul "Pseudo-Random Code" aceasta garanteaza ca receptorul nu va capta accidental semnalul altui satelit. In colncluzie toti satelitii pot folosi aceiasi frecventa fara a se bruia unul cu celalalt, ceea ce face si mai dificil pentru o forta ostila sa bruieze sistemul. Acest "Pseudo Random Code" ofera Departamentului de Aparare al S.U.A o cale de a controla accesul in sistem.
3.Pentru a masura timpul de propagare GPS-ul are nevoie de o determinare precisa a acestuia.
Care este precizia ceasurilor?
Cronometrarea este foarte dificila intrucat timpii sunt foarte mici. In cazul in care satelitul este chiar deasupra ,timpul de propagare va fi de circa 0,06 secunde de unde si necesitatea unor ceasuri foarte precise. Satelitii sunt prevazuti cu ceasuri atomice cu o acuratete de nanosecunde, insa sunt foarte scumpe. Un satelit este prevazut cu 4 ceasuri atomice. Pretul unui singur ceas este de 50.000-100000 $. Receptoarele GPS de la sol au ceasuri cu cuart, nu foarte scumpe dar nici asa precise.
Intrucat orice eroare de la timpul universal va afecta masuratorile , receptorul va cauta un factor de corectie care poate reduce masuratorile de sincronizare pina când se intersecteaza intr-un singur punct. Prin sincronizarea cu timpul universal al ceasului receptorului cu cel al satelitului vom avea la receptor o acuratete a unui ceas atomic!
Din moment ce obtinem aceasta corectie in urma sincronizarii cu satelitii, se aplica si la restul masuratorilor si avem o pozitionare precisa.O consecinta a acestui principiu este ca orice GPS rezonabil va avea nevoie de patru canale pentru a face patru masuratori simultan.
Cu acest "pseudo-random code" si o extra-masuratoare care ne fac perfect sincronizati la timpul universal avem tot ce ne trebuie pentru a masura distanta pina la un satelit in spatiu.
Masurarea distantei.
1. Distanta pina la un satelit este determinata prin masurarea timpului in care semnalul ajunge la satelit la receptort.
2. Pentru a face masurarea presupunem ca si satelitul si receptorul genereaza acelasi "Pseudo Random-Code" exact in acelasi timp.
3.Comparind cit de tirziu apare "pseudo-random code"-ul, fata de codul receptorului,determinam de cit timp a avut nevoie sa ajunga la noi.

4. Multiplicam timpul de propagare cu viteza luminii si obtinem distanta.
4.Pe linga distanta este nevoie a se cunoaste exact poziţia satelitilor in spatiu prin orbite aflate la mare altitudine si o monitorizare atenta a acestora.
Poziţia satelitilor
Orbitele de baza ale satelitilor sunt foarte exacte dar pentru a face lucrurile perfecte,satelitii GPS sunt in mod constant monitorizati de catre Departamentul de Aparare al S.U.A.Ei folosesc radare foarte precise pentru a verifica altitudinea,pozitia si viteza fiecarui satelit.
Erorile pe care ei le verifica si corecteaza sunt numite "erori efemere" pentru ca afecteaza orbita satelitilor si sunt efemere. Erorile sunt cauzate de pulsul gravitational al lunii si soarelui si de presiunea radiatiei solare asupra satelitilor. Erorile sunt foarte mici dar daca se doreste o mare acuratete trebuie luate in calcul. Odata ce Departamentul de Aparare al S.U.A. a masurat pozitia exacta a satelitului ei transmit informatia la satelit. Atunci satelitul include pozitia corectata in semnalele de sincronizare pe care le transmite.
Asadar semnlul GPS este mai mult decit un "pseudo-random code" folosit pentru sincronizare. El contine deasemenea un mesaj de navigatie cu corectii.
5 .In sfirsit , trebuie corectat semnalul radio de orice erori aparute la propagarea prin atmosfera.
Cateva tipuri de erori
1.Atmosfera si ionosfera pamintului cauzeaza intirzieri ale semnalului GPS care conduc la erori de pozitionare.

In timp ce semnalul GPS trece prin particulele incarcate ale ionosferei si apoi prin vaporii apei din troposfera,semnalul este incetinit putin,aceasta creind acelasi fel de erori ca niste ceasuri imprecise.
Exista o serie de cai de a minimiza asemenea erori.De exemplu putem prezice ce intirziere va aparea intr-o zi tipica. Aceasta este numita modelare si ajuta la determinarea pozitiei, dar conditiile atmosferice sunt rareori la fel.
|
Sursa erorilor |
Potentialul de eroare |
Eroarea tipica |
|
Ionosfera |
5.0 metri |
0.4 metri |
|
Troposfera |
0.5 metri |
0.2 metri |
|
Efemeride |
2.5 metri |
0 metri |
|
Abateri ceas sateliti |
1.5 metri |
0 metri |
|
Efectul multibanda |
0.6 metri |
0.6 metri |
|
Measurement noise |
0.3 metri |
0.3 metri |
|
Total |
~ 15 metri |
~ 10 metri |
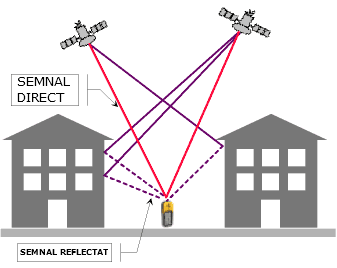
2. Semnalul se poate "lovi" de multe piedici locale pina ajunge la receptor.
Aceasta este numita eroare " multipath"- multibanda si este similara cu efectul de "fantoma" intilnit la receptoarele TV. Receptoarele bune folosesc tehnici sofisticate de respingere a semnalului pentru a minimiza problema.
3. Probleme la satelit.
Desi satelitii sunt foarte sofisticati,sunt dispusi la unele mici erori in sistem.
Ceasurile atomice pe care le folosesc sunt foarte,foarte precise dar nu sunt perfecte.Pot aparea discrepante mici,discrepante care duc la erori la masurare.
In final daca toate aceste lucruri au fost explicate putem trece la masurarea efectiva in teren, obligatoriu sa avem vizibilitate la cer.

In concluzie nu poti determina poziţia cu exactitate a unui punct masurat fara sa foloseti un aparat GPS geodezic la care ulterior sa aplici nişte corectii in cazul măsurătorilor statice, exista insa si posibilitatea obtinerii corectiilor in timp real cu ajutorul aparatelor prin folosirea internetului in sistemele RTK(Real Time Kinematic)
Cu ajutorul unui smartpone nu vei putea face măsurători geodezice insa pentru navigatie este tot ce ai nevoie.
Aici puteti sa reveniti la meniul pentru selectia articolelor din blog